To address the critical challenge of insufficient classification accuracy for UAV flight control radio frequency (RF) signals in complex electromagnetic environments, this study proposes a novel classification framework combining Multiscale Dispersion Entropy (MDE) feature fusion with an Artificial Lemming Algorithm (ALA)-optimized BP neural network. The proposed method first employs MDE to extract robust multiscale dynamic features from RF signals, constructing a discriminative 12-dimensional feature matrix, then utilizes the biologically inspired ALA to globally optimize the BP network’s weights, biases, and hidden layer architecture through its unique migration-burrowing-foraging-predator avoidance mechanisms that dynamically balance exploration and exploitation. Extensive experiments on the DroneRFa dataset containing six mainstream UAV models demonstrate the framework’s superior performance, achieving 97.2% classification accuracy (a 4.7-7.1% improvement over conventional GA-BP and PSO-BP methods), remarkable noise robustness (maintaining 90% accuracy at SNR=0 dB), and accelerated convergence (reaching 90% accuracy in just 65 iterations), with further validation from ROC analysis showing an exceptional AUC of 0.97. These results collectively confirm that the MDE-ALA-BP approach effectively overcomes the limitations of existing methods in complex electromagnetic scenarios, providing a reliable and efficient technical solution for enhanced airspace security monitoring and low-altitude traffic management systems.
Existing UAV detection technology systems mainly contain mainstream paradigms such as radar detection6,7, optoelectronic/infrared sensing8,9, acoustic recognition10, RF signal parsing11 and deep learning-based intelligent recognition12.The performance of different technological approaches exhibits significant disparities. Radar technology, as a traditional detection method, can obtain high-precision spatial coordinates, but it has inherent resolution limitations for detecting Low-Slow-Small (LSS) targets and is prone to false alarms due to complex ground clutter. Optoelectronic/infrared sensors rely on target spectra to achieve UAV identification, making them particularly suitable for nighttime or covert operations. However, their detection efficiency is constrained by atmospheric attenuation effects, and the signal-to-noise ratio deteriorates significantly under adverse weather conditions such as fog and rain, drastically reducing detection performance.The acoustic detection method locates targets by capturing sound signals generated by UAVs. While this approach is low-cost and easy to deploy, its engineering practicality is limited by the high environmental sensitivity and short propagation distance of acoustic signals. Deep learning-based visual recognition methods demonstrate excellent performance in target classification tasks but suffer from inherent drawbacks such as insufficient model generalization capability, vulnerability to adversarial samples, and heavy reliance on labeled data. Additionally, they struggle to adapt to new or unknown UAV models.
RF signal detection technology realizes target identification by parsing the communication signal between the UAV and the controller, showing unique technical advantages: firstly, the RF signal has the ability of non-line-of-sight (NLOS) penetration, which can effectively overcome the physical limitations of the traditional optical sensors such as building obstruction and complex terrain; Secondly, the technology has all-weather operation stability, and its performance is not interfered with by external variables such as lighting conditions and meteorological environment, which is especially suitable for critical scenarios requiring continuous monitoring such as border security and airport perimeter;Then, RF signals can capture features specific to the UAV manipulation link, providing an essential differentiation basis for the construction of a highly robust recognition model; finally, RF signal detection and recognition also has an early warning function, which is important for the prevention of UAV-related safety accidents, as RF signals can be captured at a longer distance, and thus can provide earlier warnings. Nevertheless, the existing RF identification methods still have core problems such as single dimension of signal feature extraction and insufficient classification accuracy in complex electromagnetic environments13,14.
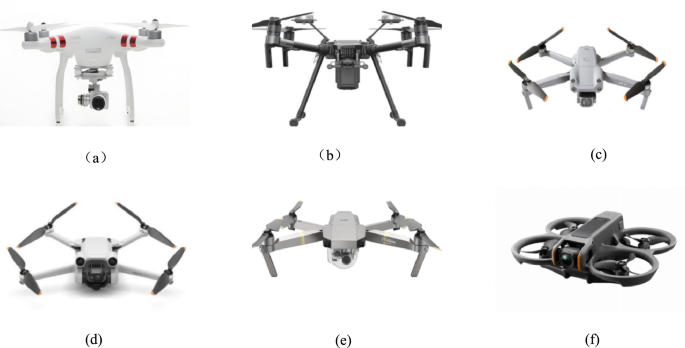
This paper proposes a hierarchical recognition framework for UAV RF signals based on Multi-scale Dispersion Entropy (MDE) feature fusion and Artificial Lemming Algorithm (ALA) optimized BP neural network.The primary objective is to address the critical issue of slow convergence and low accuracy of traditional methods in complex environments. We argue that superior convergence performance and noise robustness are fundamental prerequisites for practical deployment. Validation is performed by constructing an open-source RF signal dataset containing six mainstream UAV models. The experimental results show that the proposed method has significant advantages in convergence speed, classification accuracy, and feature characterization capability, thereby providing a high-performance algorithmic foundation for non-cooperative UAV recognition applications.
Multiscale dispersion entropy (MDE) has high robustness concerning noise, and can effectively extract useful feature information even in noisy data. It can analyze signals on multiple time scales, thus capturing the dynamics of signals at different frequency components. Compared with some other complex entropy measurements, the multi-scale scattering entropy calculation is more efficient and more practical when dealing with large-scale data sets15,16.
The size of the cosine similarity indicates the ordered state of the time series \(X = \{ x_{1} ,x_{2} ,...,x_{N} \}\), the larger the cosine similarity indicates that the time series is more ordered, and the smaller the cosine similarity indicates that the time series is more diverse. Divide the interval [?1,1] of the above equation into different intervals, then calculate the probability that the cosine similarity falls into each interval, and then get the state probability set \((P_{1} ,P_{2} ,...,P_{\varepsilon } )\), and satisfy \(\sum\limits_{k = 1}^{\varepsilon } {P_{k} } = 1\)\((I_{1} ,I_{2} ,...,I_{\varepsilon } )\)
Published on 3/12/2026